Watch movies of the Flying
Flock here.
Watch movies of the Flying
Flock here.
Watch movies of the Flying
Flock here.
| The Flying Flock: Collective Locomotion in a Group of Small Scale
Aerial Robots
|
|
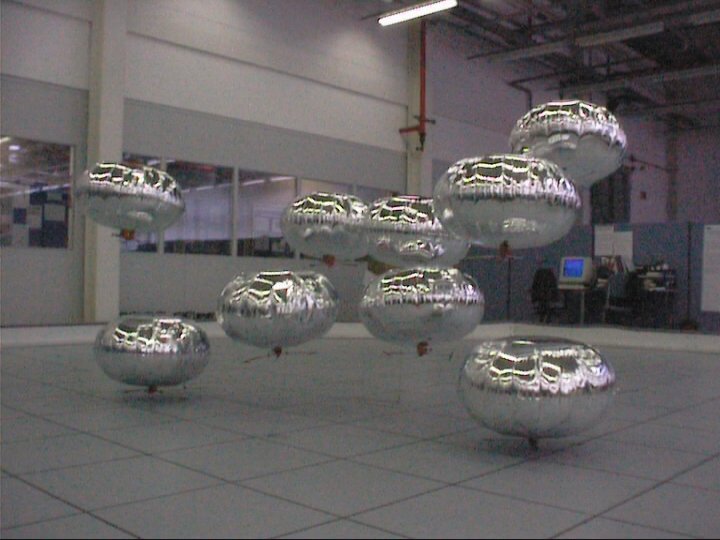
The principle aim of this research is to develop a set of collective minimalist movement algorithms for use on a group of flying autonomous robots. A group of physical robots has been designed and constructed and have been used to demonstrate how swarming and homing in three dimensions can be achieved using only simple rules. The robots employ helium balloons (blimps) and therefore have a limited payload for the propulsion, communication and localisation systems. This payload constraint has led to the development of a very small and lightweight biologically inspired robotic system. This inspiration comes from large groups of social insects that employ only local sensing and communication and do not directly communicate with all group members. The constraints imposed on the robots therefore do not allow for sophisticated or long-range communication equipment as these would both increase the power consumption and exceed the weight limit. Therefore, this study employs local sensing, indirect communication and minimal computation. The figure below shows the flock of fully functional Aerobots in our experimental arena.
|
|
The Flying Flock
|
|
| The Autonomous Aerial Robots
|
|
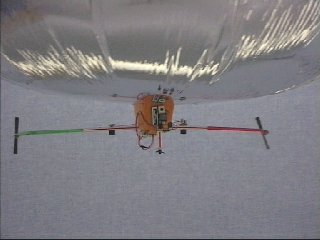
As the name of this study implies a group of ten autonomous aerial robots were designed and built as a test bed for the research. The space available for experimentation was limited so to make the best use of it the robots were made as small as possible with the facilities at our disposal. The picture map below shows the blimp gondola attached to the envelope.
|
|
|
|
The main components of the autonomous Aerial robots are listed below, each of the headings will also link to the relevant information: Envelope, Gondola, Propulsion, Control, Transmitter, Receiver, Sensors, Ultrasonics, Power |