|
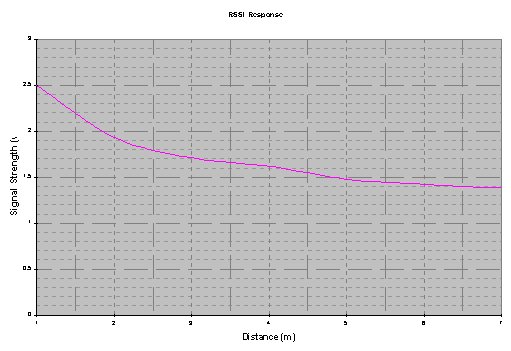
The heart of this system is the receiver which is based on a low power Phillips SA607 FM demodulator IC which has a logarithmic received signal strength indicator (RSSI). This RSSI signal is fed into an analogue to digital converter (ADC) on the control board and is used to calculate the distance to the transmitter being scanned. The graph below shows the RSSI plotted against distance, which demonstrates that for the most part the relationship is logarithmic and can be easily converted to a relatively accurate distance measurement. |
|
|
|
|
|
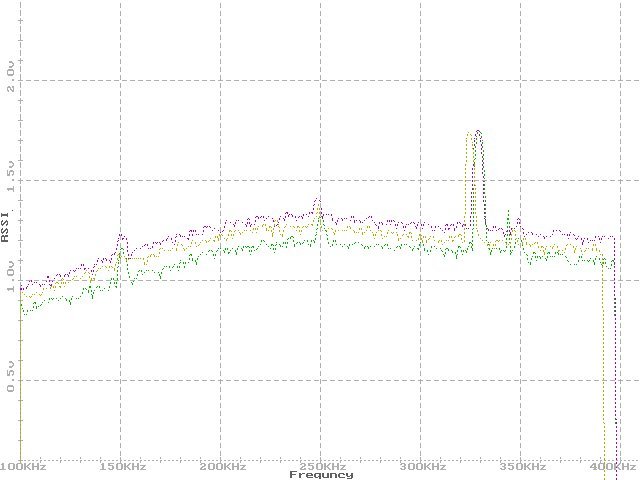
The system uses Frequency Division Multiplexing (FDM) where each blimp transmits on a separate frequency which is selected to minimise interference between the blimps or noise present in the environment. There are a range of sources of noise that could interfere with the infrared system, especially at the frequencies being used (200KHz to 600KHz). One of the main sources of noise within the experimental environment is the high efficiency fluorescent lighting, which tends to operate at approximately 50KHz causing noise at this frequency and the frequency of the harmonics, however, there is not much of this harmonic noise above 200KHz. Therefore the system operates above 200KHz to avoid this noisy part of the frequency spectrum. As was mentioned earlier the on board switching power converter operates at approximately 330KHz causing a huge noise spike around this frequency (see figure 3.12). The number of available useable frequencies is therefore limited by sources of noise and harmonic interaction between each frequency. Therefore, each of the blimp frequencies used was chosen so as to minimise these problems. A frequency scan of the background noise is shown in figure 3.12 below, this frequency plot was produced by importing the RSSI signal from the blimp into a program running on a laptop. The lower part of the frequency spectrum (100 - 200KHz) has a lower noise level because the circuit is tuned for use above 200KHz.
|
|
|
|