| Ultrasonic Height Control
|
|
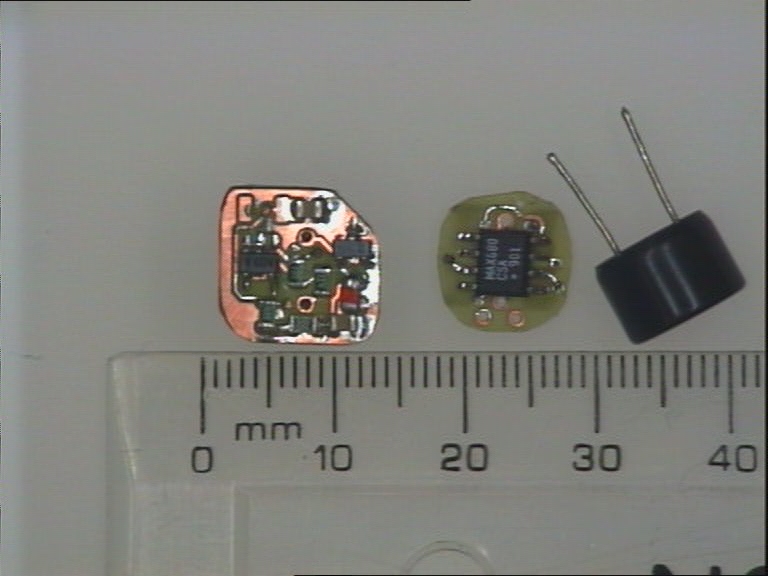
A lightweight ultrasonic ranging system that gives the blimps the ability to control their height to within a few centimetres with a maximum range of 3-4 metres has been designed. The sensing system has a very good accuracy (within a few millimetres), however, the dynamics of the blimp and its propulsion system do not allow for very accurate height control. The transmitter bounces a 40KHz ultrasonic pulse off the floor, which is picked up by the receiver to give a time of flight. The time-of-flight is then multiplied by the speed of sound and divided by two to give a distance measurement. For simplicity and to minimise processing power the first echo received is used to calculate the distance, i.e. the system does not check to see if it was a valid signal by counting the number of pulses received. This system works very well when used over a smooth flat surface but tends to give reduced range and accuracy when operating over a carpeted area. The accuracy and range are not only affected by the reflecting material but also the alignment of the receiver and transmitter. To gain maximum range and accuracy the transmitter is placed at least 50mm from and parallel to the receiver. The system uses small separate ultrasonic transducers for the receiver and transmitter to enable short-range measurements since a single transducer would require, a blanking period to enable it to settle after a transmission. A time decaying threshold system is employed, which initially gives a high threshold to stop false triggers through conducted noise and then decays to a pre-set minimum allowing the weaker, more distant echoes to be registered. The circuit boards were made from standard 3mm board and were reduced in thickness to less than 1mm to save weight, which was initially an experiment to see how easy it would be to make our own thin lightweight boards. This system can also be used for forward facing collision avoidance because it can detect objects more reliably and accurately than the infrared system.
|
 |