Propulsion system |
|
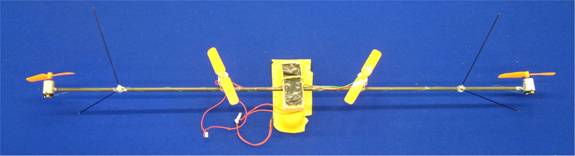
Thrusting on the Aerobot is achieved with four small fan units capable of supplying approximately 15g of thrust (each) at full power. Each of these units consists of a small DC electric motor fitted with a small plastic propeller. The plastic propellers are 6.5cm in diameter and weigh 0.4g each. Each of the fans is controlled with a full bridge driver to enable operation in both directions, and pulse-width modulation (pwm) to give digital speed control.
|
|
Motor and Propeller
|
|
One fan is mounted at each end of a carbon fiber arm to provide forward, reverse and axial rotation of the blimp. The remaining two fans are fitted beneath the gondola to provide movement in the vertical axis. These two fans are counter rotating so as not to introduce any turning moment into the blimp, as this was a serious problem when using a single fan.
|
|
Four Motor Propulsion System
|
|
A second propulsion system has also been designed; this uses just two fans fitted to a gimballed arm. The arm has a small gear which is meshed with a gear on a servo allowing full 360 degrees movement. This system can be plugged onto the bottom of the gondola as a replacement for the four motor version.
|
|
Vectored Thrust System
|
|
|
|
Home Envelope Gondola Propulsion Controller Ultrasonics Batteries |
|
|