Batteries |
|
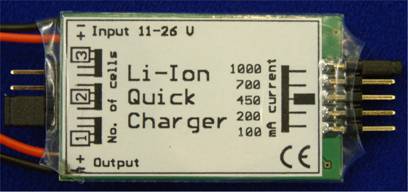
Battery choice was mainly influenced by the gravimetric energy density available: the lighter the battery for a given capacity the better. It was decided to use a rechargeable (secondary) technology, because the amount of experimental run time would incur massive costs if a non-rechargeable (primary) battery technology were used. Four types of rechargeable battery were considered: Nickel Cadmium (Ni-Cad), Nickel Metal Hydride (Ni-MiH), Lithium Ion (Li-Ion) and Lithium Polymer (Li-Pol). It was soon clear that that for this application the new Lithium polymer batteries that have recently become available were the best choice. There are two batteries used on the Aerobot, one for the electronics and the other for the motors. The two cells used for the Aerobot are, Kok3270 (3270mAh @ 64) for the electronics and a Kok2020 (2020mAh @ 43g) for the motor supply. Normally Li-Polymer batteries have built in IC protection circuits to prevent the cells from experiencing over or under voltage conditions, however, the Aerobot uses raw cells with no protection. If the cell is charged above 4.25v or discharged below 2.5v it will be damaged, therefore, a special Li-Pol charger must be used. The charger used is a WesTek Lithium Ion/Polymer microprocessor controlled charger capable of charging 1-3 cells at various currents. With this charger set on the highest current setting a 3.3Ah cell takes approximately 3 hours from 2.5v to fully charge. The charger will take an input voltage of up to 26v DC.
|
|
Kokham Lithium Polymer 3.3Ah Cell
|
|
WesTek Charger
|
|
Having separate supplies increases the run time of the system considerably, as the radio LAN is very sensitive to voltage fluctuations caused by the motors.
|
|
|
|
Home Envelope Gondola Propulsion Controller Ultrasonics Batteries |
|
|