|
Energy Autonomy: Towards a
truly Autonomous Robot |
|
EcoBot II: A robot powered on a diet of flies Any problems with downloading pictures or movies please email Chris Bytheway or Ian Gilhespy
EcoBot Download page here. Download ALL pictures and movies. |
|
Autonomy One important factor for robots is that of energetic autonomy. Robots
will be required to extract energy from the environment. In many ways robots will
face the same problems as animals. An earlier phase of our work centred around the use of slugs as a bio-fuel. This resulted in the
construction of the 'SlugBot' - a robot which
could identify and pick up slugs to be used in an anaerobic 'digester'. This
phase is now finished. Please follow
this link for more details on the SlugBot project. The main objective of our work is to build energetically autonomous robots. We believe that MFC technology is a good way forward, as the robot will incorporate in its behavioural repertoire actions that involve search and get hold of food and also remain inactive until energy is sufficient to do the next task. This will be a paradigm shift in the way action selection mechanisms have been designed so far. Our current work
is now focusing upon the use of plant material as a source of energy. In this
work we are exploring the use of microbial fuel cell technology - 'bug power'. The project is code-named EcoBot
and the first stage of this investigation is now completed. This involved the
construction of a proof-of-concept sugar-eating robot, named
EcoBot I, that follows the light. Further details can
be found by clicking on
EcoBot I. |
EcoBot IIThe next stage, involves the construction of a robot, which is called
EcoBot II that also performs phototaxis but at the same time reports the
temperature remotely. It is powered by Microbial Fuel Cells (MFCs), containing
a flora of microorganisms originating from sludge and fed with dead flies
or rotten fruit. In contrast with its predecessor, EcoBot I, which was the first robot in the world to acquire all its onboard power from MFCs (i.e. it carried no batteries) utilising refined fuels (sugar), EcoBot II utilises raw foodstuffs such as flies or rotten apples. It is also the first in the world to employ the gas (O2) diffusion cathode, which in terms of autonomy is extremely important. What is novel about our work is the integration of MFCs fed with raw substrate and utilising O2 from air with a small scale robot. In the MFC anode, bacteria found in sludge, act as catalysts to
generate energy from the given substrate (flies or rotten apple). In the MFC
cathode, O2 from free air acts as the oxidising agent to take up the
electrons and protons to produce H2O. This closes the circuit and
keeps the system balanced. In a different cathode configuration, ferricyanide
(K3Fe3-[CN]6) acts as
the oxidising agent to close the circuit. (For more detail on the MFC operation
please click
here). Both of these systems have
been tried with similar success.
A total of 8 MFCs wired up in a series configuration have been used to power the robot which moves in a ‘pulsed’ mode. This means that the robot movement is discontinuous i.e. when a low threshold level is reach, the robot becomes ‘inactive’. In the mean time energy from the MFCs is accumulated in a bank of 6 capacitors until a second (higher) threshold level is reached. In this case the robot resumes power and moves towards the light whilst transmitting wirelessly the value of temperature at that point in time. The whole concept of the experiment is shown in the schematic diagram of Figure 1. An electronic circuit switches between the two thresholds and directs power to either or both motors (depending on the reading from the photodiodes) and the wireless transmitter. |
|
|

|
Figure 1. EcoBot II with the O2 cathode MFCs moving towards the light whilst transmitting the temperature to a base-station. The maximum (indoors) range of transmission is 30m. |
|
Relationship with other work EcoBot II is not the first robot in the world to use bacteria. The first was Wilkinson’s Gastronome (Chew-chew) in 2000, which employed chemical Fuel Cells to charge up a bank of Ni-Cd batteries. Power was generated by E. coli fed with refined sugar, and a synthetic mediator (HNQ) enhanced the electron transfer process to the chemical fuel cells.
As
far as MFCs are concerned, we are not the first group in the world to exploit
sludge, and certainly not the first in the world to use the O2
cathode. To the best of our knowledge the first sludge MFC reported in the
scientific literature was from Habermann and Pommer back in 1991, in which case
they had a stack of MFCs running continuously for 5 years. In later years, Park
and Zeikus (2002) had done some significant experiments with sludge, E. coli
and neutral red. And more recently, but certainly before us,
|
|
Figure 2 is a picture of the EcoBot II with the wireless transmitter onboard, powered by MFCs with the ferricyanide cathode. Click on the image to watch the movie of the robot moving towards the light. |
|
(Windows Media version) Large file 33MB download (Real player version) Small file 0.99MB download (We recommend viewing the Real player version unless you want to download the full movie)
|
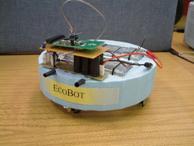
| Figure 2. EcoBot II fully assembled powered by MFCs with the ferricyanide cathode |
|
Figure 3 (a) is a graph of the distance travelled by the robot vs. time and (b) is a graph of the average temperature transmitted vs. distance. Both graphs show the average values from the 5 times that the experiments were repeated. |
|
|
|
|


|
Figure 4 is a snapshot from the EcoBot II powered by MFCs with the oxygen (O2) cathode performing phototaxis. Click on the image to watch the movie of the robot moving towards the light. |
|
(Windows Media version) Large file 35.4MB download (Real player version) Small file 0.99MB download (We recommend viewing the Real player version unless you want to download the full movie)
|

|
Figure 4. EcoBot II performing phototaxis powered by MFCs with the O2 cathode |
|
Figure 5 is a schematic diagram of EcoBot II. |
|
|

|
Figure 5. Labelled schematic representation of EcoBot II. Click on the robot for a larger image. |
|
IAS lab is involved in a number of multi-disciplinary projects, which goes to show that we are moving away from conventional robotics. This broadens the scientific boundaries within which our lab operates. For this reason we have constructed the EcoBot lab shown recently constructed in the IAS area acting as part of the main Microbiology Research Lab (MRL) of the Faculty of Applied Sciences. |
|
|

MFC vs. alkaline batteryA single MFC is certainly no match to a standard AA size alkaline
battery. The output voltage is 0.8V, the capacity is 163mAh and the energy is
37mWh. It weighs 100g and costs ~ £3.00. The AA alkaline cell gives an output
voltage of 1.5V, has a capacity of 2.8Ah and an energy content of 4.2Wh. It
weighs 25g and costs ~ £0.30. So the energy density of the MFC is 1.33J/g
whereas of the AA battery is 604J/g. We would like to emphasise however that
the most important difference between the two is the fact the
an MFC can provide continuous energy supply for as long as the bacteria
can be kept alive. Potentially this can be years in a continuous mode system,
where there is continuous inflow of key ingredients (in this case simply
sewage) and continuous outflow of waste products. |
| Questions on the IAS Laboratory to Chris Melhuish: chris.melhuish@uwe.ac.uk |