The LinuxBot: A Wireless Web-server on Wheels!
We have successfully ported a fully networked Linux onto a miniature wheeled mobile robot.
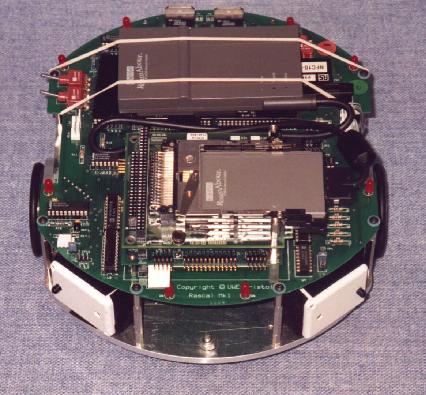
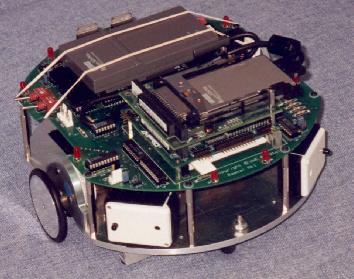
The robot is equipped with a PC/104 controller and a wireless LAN adapter. With Linux the robot becomes a fully networked node on a wireless LAN, running Telnet, Ftp and Web servers. In operational use the robot has no keyboard or display; the only means of communicating with the robot's controller is via the wireless LAN. However, since our Lab is equipped with a wireless LAN infrastructure, then we can log-in to the LinuxBot from any networked PC or workstation. The Linux installation includes the C compiler and its libraries and tools, so all program development can be carried out, via wireless Telnet, in the target environment. We chose the Slackware distribution because, unlike most other Linux distributions, it will run comfortably in 4MBytes of RAM, and can be installed from floppy disks. (Ok, installation from floppy disks is painful, but it is good for the soul!)
What is particularly remarkable is that the LinuxBot will quite happily run a robot control program (ie wall avoidance) as a background task, while simultaneously managing a number of remote Telnet login sessions, and serving up Web pages. And all of this on a humble 25MHz 386 processor! It isn't just a warped sense of satisfaction that leads us to use such meagre processing resources. A mobile robot has to carry its power supply (ie its battery) around with it, so weight and power consumption are critical. MIPS/Joule is a much more important metric than just MIPS alone.
We now intend to build a small fleet of LinuxBots, as a platform for ongoing research in Distributed Mobile Robotics. We are convinced that the wireless networked Linux environment will provide an outstanding operational infrastructure and software development platform for this work.
Technical specification:
| CPU Card | Ampro 3SXi PC/104 processor card: 25MHz 386 with 4MBytes RAM |
| PCMCIA | Ampro PC/104 pcmcia mini-module |
| Wireless LAN Adapter | Digital RoamAbout 2400/DS (Direct Sequence), operating at 2.4GHz with a data rate of 2MBits/s |
| Solid-state Disk Drive | SanDisk 1.8" 80MByte IDE FlashDrive |
| Linux | Slackware Distribution version 2.7.12, kernel version 2. |
Web links:
LinuxBot robots page.
Acknowledgements:
For further information on the LinuxBot development contact: Alan Winfield.
Some more pictures of the LinuxBot…
 |
 |
 |