|

|
 |
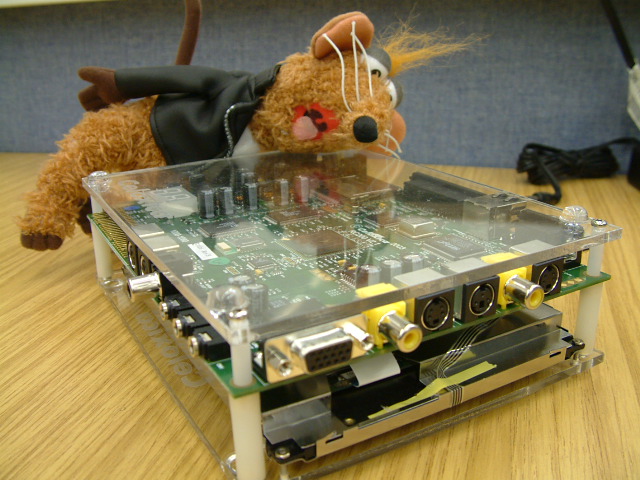
 The project mascot with FPGA controller
|
|
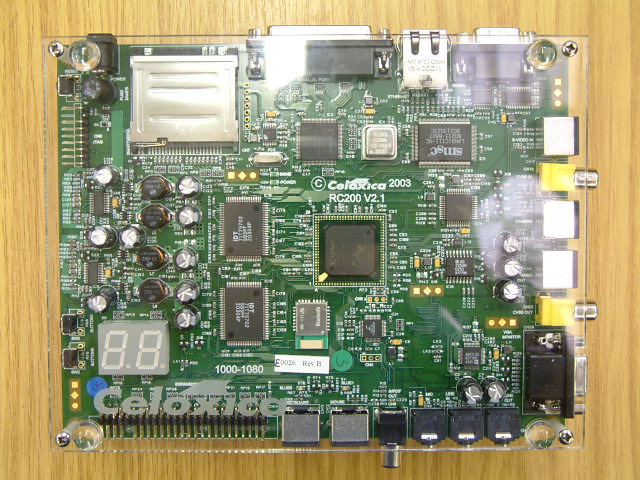
 FPGA controller I/O ports
|
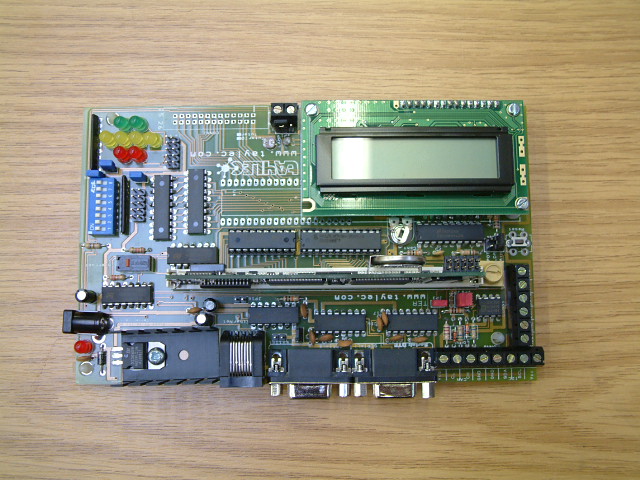
 DSP Texas Instruments Controller
|
|
|
|
WhiskerBot |
|
|
WHISKERBOT: “it’s the rat’s whiskers….” IAS lab. members: (Chris Melhuish, Tony Pipe, Mokhtar Nibouche, Martin Pearson, Ian Gilhespy) Main web site for project: (www.whiskerbot.org ) Funding body: EPSRC Grant no. GR/S19639/01
|
|
IAS begins a collaborative project with the Adaptive Behaviour Research Group at the University of Sheffield. The study, funded by EPSRC and referred to as the 'Whiskerbot' project, will investigate a biomimetic artificial whisker system which could provide a novel form of robot tactile sensor capable of texture discrimination and object recognition. The project will involve mounting an array of actively-controlled artificial whiskers on a mobile robot that will input to biologically-accurate computational models of sensory pathways in the rat brain. |
|
|
|
|
|
The project mascot with FPGA controller
|
|
FPGA controller I/O ports
|
|
DSP Texas Instruments Controller
|
|
|
|
Overview of the project: The family of Mammals known as the Rodents can orientate themselves effortlessly through what we as engineers would describe as "exceptionally noisy" environments. Confined, dark, dusty and smelly places are the dominion of the rat, and their ability to move, locate food and mate in such conditions is largely due to their facial vibrissae, or whiskers. Their regularly distributed array of vibrissae have been demonstrated to discriminate between textures, recognise objects, determine whether the creature can fit through an opening, follow walls and so on; in brief, they can extract a lot of useful environmental information using an apparently simple, single sensory mode.
|
|
|
Figure 1: The rather unimaginatively named R4513 who is helping us with our investigation. The regular array of R’s vibrissae is clearly shown here. |
Figure 2: Cross-section of the Mystacial pad of a less fortunate rodent. The dark spots indicate where each vibrissa originates in the pad |
|
|
|
|
Our interest in this sensory modality is from two quite distinct but heavily inter-twined perspectives; Firstly, as Roboticists, we wish to determine how the whisker system works and implement an artificial interpretation for use in mobile robotics. Secondly, as neuroscientists/behavioural biologists, we wish to extend our knowledge of biological systems by physically realising some of our theoretical extrapolations. It is hoped that this will not only verify or discredit some of the established individual theories and models but also by putting them into the context of a complete system exposed to real world conditions in a real time environment we will be forced to consider exactly how they work.
The IAS laboratory has naturally taken the role of the engineer in this bilateral collaboration and is therefore principally responsible for implementing the artificial system. We are also responsible for informing the neurobiologists ABRG about what is and what isn't physically realisable and to provide advice as to how we as human engineers would solve the problems which they observe being overcome by the rodent neurology.
Our desire to model the rodent whisker sensory system as bio-mimetically as possible has resulted in the construction of our own vibrissae using composite materials formed in custom built moulds.
|
|
|
Figure 3: 2 part custom built moulds
|
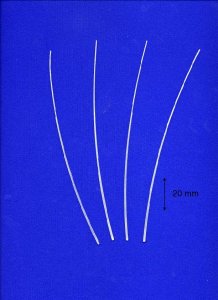
Figure 4: Example of curved whiskers moulded using glass fibre/resin composite |
|
|
|
|
These vibrissae form the front end of an artificial nervous system which is being implemented using high speed DSP processors and Field Programmable Gate Arrays (FPGA). This nervous system will interface with a new mobile robotic platform (or body) which has been designed for maximum manoeuvrability within confined spaces. The environment in which "Whiskerbot" will operate has also been defined and will include such features as; different textured panelling, openings with various width apertures, tunnels and objects such as posts and cones.
|
|
|
1) Neural modelling This is predominantly the concern of the Neurobiologists in Sheffield who have access to large resources of literature and significant previous experience. The work undertaken in this field involves detailed literature reviews, conferencing and discussion, implementation of theories using software based neural modelling platforms and testing using simulated stimuli. |
|
|
|
|
|
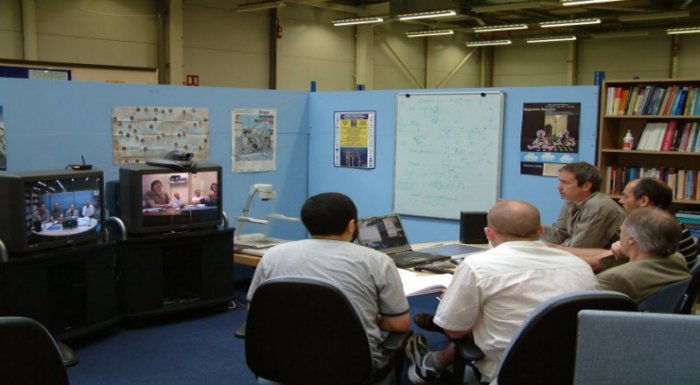
Figure 5: A typical Whiskerbot video conference; this form of communication has proved invaluable for the adhesion of the two groups making enormous savings of time, money and ultimately the environment by us not having to be in the same room to have a meeting.
|
|
|
So far the main neural pathways of the system have been established and the principle neural structures identified. An empirically based model of the rat follicle has been designed which can reproduce the spike patterns obtained from biological observations (“Empirically Inspired Electro-Mechanical Model of the Rat Mystacial Follicle-Sinus complex”).
Sections of the Trigeminal Complex (gateway from peripheral to central nervous system) have been modelled and a theory of vibrissae receptive field adjustment is currently being tested.
|
|
|
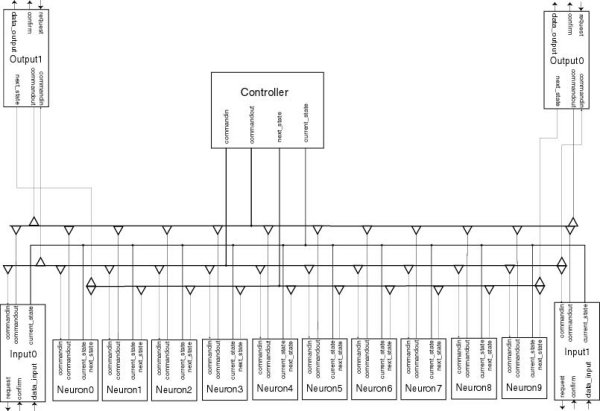
2) Real time embedded neural modelling The requirement for a mobile robotic implementation of the whisker sensory system demands that the processing paradigm chosen to implement the neural models must be both portable and capable of hard real time performance. This requirement provoked the design of a hardware neural processor using FPGA, which can model up to 1000 Leaky integrate and fire “spiking” neurons and 20000 synapses in real time. The neural processor has been designed as a generic piece of hardware IP which can be instantiated any number of times in an FPGA project and connected together seamlessly to emulate much larger networks of real time neurons. Any neuron in the processor can be connected to any other or any of the 1000 inputs; therefore both sparse and regular connectivity approaches to be simulated with no loss of performance. There are 1000 outputs from the processor which can be sourced from any of the neurons or any of the inputs. This allows inputs to pass through processors in order to reach neurons located in other processors deeper within a large array incurring only a single step time delay. The underlying neuron model incorporates many phenomenological characteristics of biological neurons, including: axonal propagation delays, Gaussian and Raleighian distributed noise, independent membrane decay constants, excitatory and inhibitory post synaptic currents, absolute and relative refractory periods and spontaneous currents. In collaboration with Sheffield, a model of a section of the Basal Ganglia has been successfully implemented in real time using one of these processors.
|
|
|
Figure 6: Our mascot presenting one of the FPGA development boards the neural processor was developed on. |
Figure 7: Block diagram of SIMD based architecture of FPGA implemented real time neural processor.
|
|
|
|
|
At the front end of the whisker sensory system we have employed DSP processors to sample and filter each whisker displacement to simulate the mechanical model of the follicle sinus complex described in the publication link above. These filtered samples are then passed to an FPGA which will model 720 mechanoreceptors and pass these signals to a series of neural processors in other FPGAs which will emulate the Trigeminal Complex. The “higher” brain structures will probably be situated in very high speed DSP processors though the use of FPGA may become more predominant as our understanding of the system requirements become more complete.
|
|
|
3) Biologically inspired Mechatronics This area of the project is predominantly conducted in the IAS laboratory though a considerable amount of inspiration is obtained from the biologists in Sheffield who observe the behaviour of real rats. This collaboration has so far developed an abstract yet intricate model of the facial musculature and mechanism of rodent active whisking.
|
|
|
|
|
|
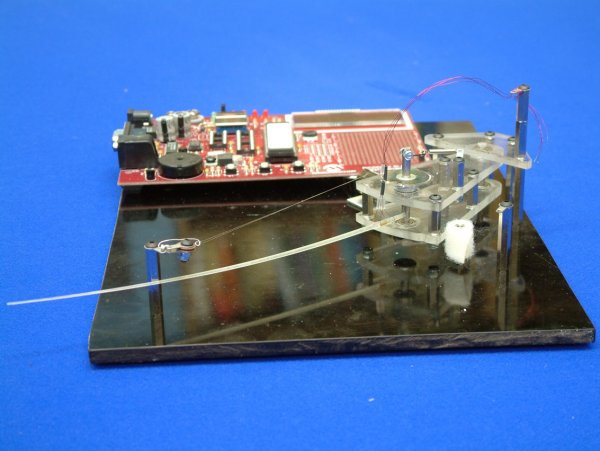
Figure 8: Prototype active whisking module; whisk speeds of up to 3 or even 4 Hz will be possible.
|
|
|
The use of BioMetal has been employed to mimic the action of the individual intrinsic muscles of the Mystacial pad (cheek). These, in an antagonistic pair with a solenoid, can be controlled to whisk in a biologically inspired form at a scaled biologically observed rate. We will be incorporating a total of 18 whiskers into our final robot (2 opposing arrays of 9 whiskers arranged into 3 rows of 3) which will be mounted on a rotating platform simulating the head/neck of the rat.
|
|
|
|
| Animated GIF of CAD files showing whisking. |
|
To watch a short movie of a rat whisking its whiskers click here. |
| Questions on the IAS lab to chris.melhuish@uwe.ac.uk |