Marv |
|
|
|
|
|
|
|
|
|
|
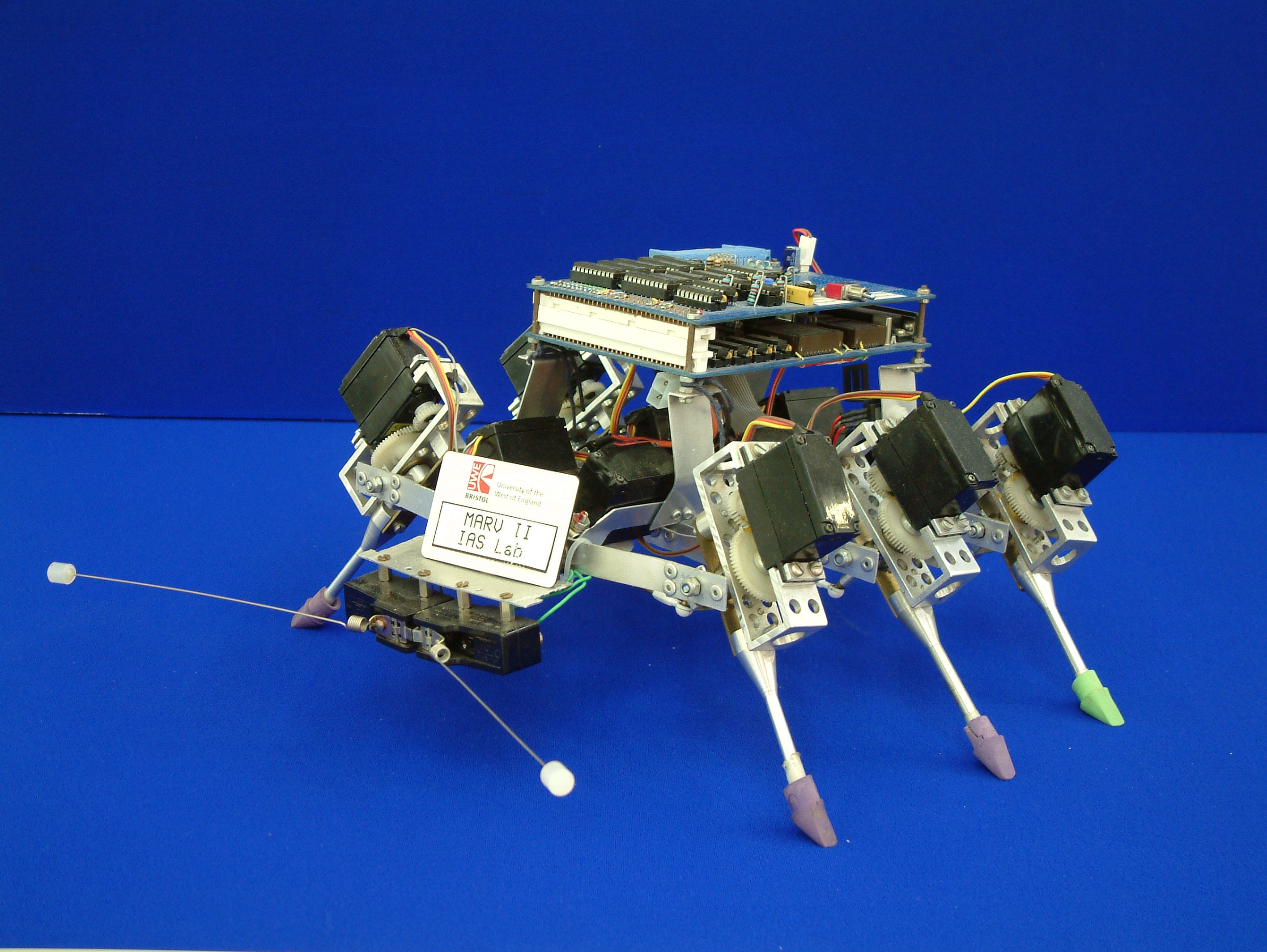
Marv has been adapted from a final year student project. It has six legs, each with two degrees of freedom, plus sensitive antennae. Onboard control is implemented using a 68000 based microcontroller. It is used to study various schemes for gait control. Watch MARV perform his tricks. |
|
|
|
| Questions on Marv, or the IAS group to Chris Melhuish: chris.melhuish@uwe.ac.uk |