|
Most mobile robots are not truly autonomous; most operate in
simplified environments. Almost all non-industrial robots still require a
helping hand from humans, e.g. battery charging, the odd push if they get stuck,
obstacles that are suited to their sensors, etc. The notable exceptions are
smart missiles, satellites and torpedoes which carry enough fuel and
computational resources to successfully complete their missions.
On the other hand, even the simplest animals are self-sufficient, both in terms
of information processing and energy. The aim of this project is to build a
robot with animal-like self-sufficiency in both information and energy. We don't
expect to be able to match the speed and performance of a cheetah chasing a
zebra, within the time frame of this project, so we decided to chase something
slightly slower ... slugs. Apart from their relative ease of capture (compared
to zebras), slugs were chosen because they are a major pest, are reasonably
plentiful, have no hard shell or skeleton, and are reasonably large. It is also
more technologically interesting to catch mobile prey rather than just grazing
on plants.
Of course, the organic resources, or food (i.e. slugs), will have to be
converted to a form of energy that is useful to a robotic system. We propose to
convert the organic material to electricity using microbial fuel cells.
Agricultural fields of winter wheat offer a suitable test bed for the robots
because slugs (Deroceras reticulatum, Arion ater ater and Arion ater
rufus) are plentiful, with up to 200 per square metre. Slugs are mainly
active at night, especially just after sunset and just before sunrise, so the
robots will have to be active at these times, and resting in order to conserve
energy during the day when most slugs are underground. Since energy conservation
will be of prime importance, and moving heavy items over soft ground will
consume large amounts of energy, the fermentation vessel, engine and generator
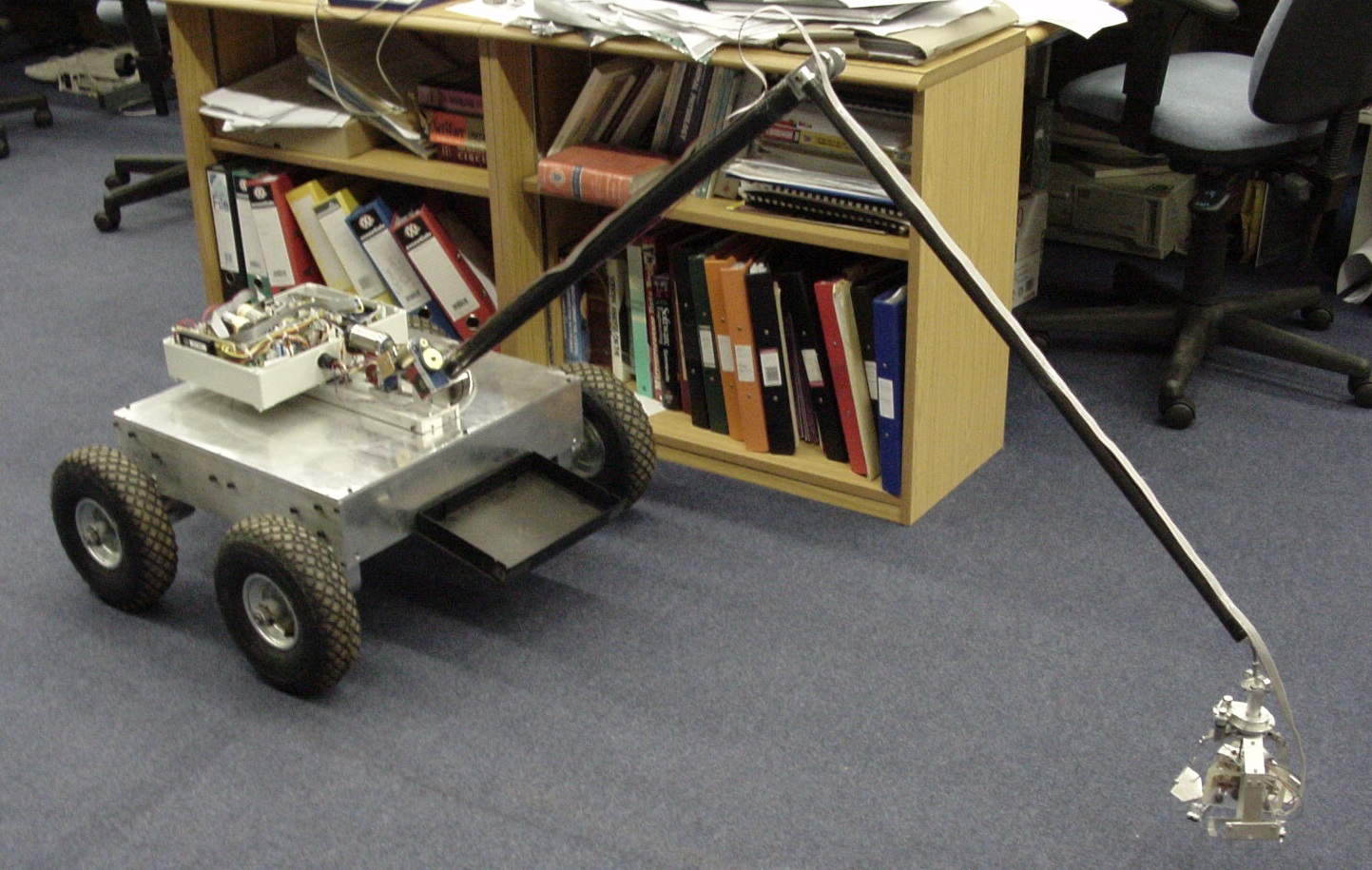
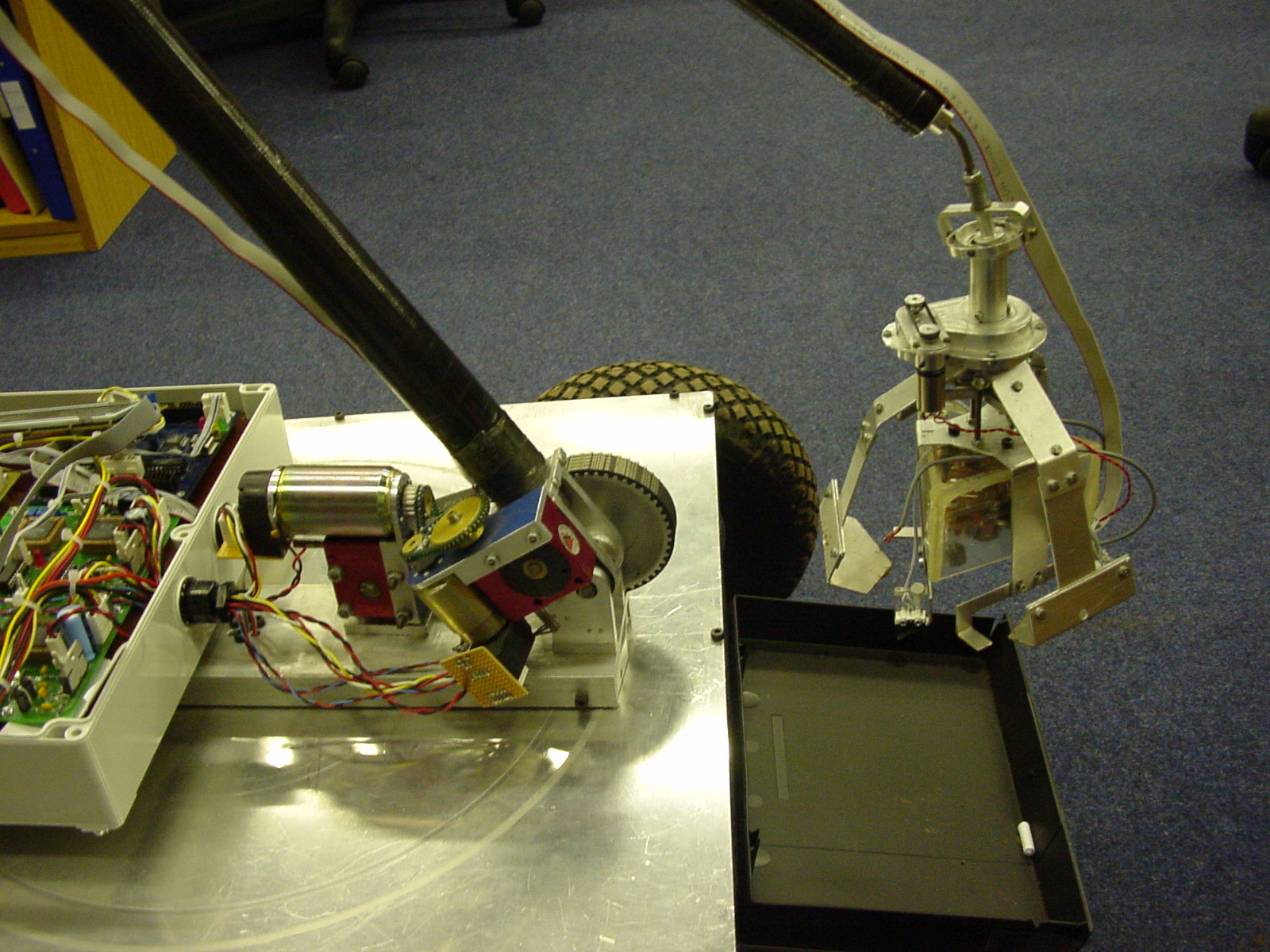
will be stationary. One or more robots will deliver slugs to the stationary
charging system and obtain power from it. In order to minimise the amount of
movement each of the robots will be equipped with a 1.5m long arm, mounted on a
turntable, which will be used both for detecting and collecting slugs which is
now working under closed loop computer control, see the following mpeg movies:
the arm moving (1MB) and the arm
scanning (1MB) and a longer but lower resolution clip of
the arm scanning (1MB) If you think that looked easy,
take a look at us trying to manually control it (3MB)
and the outtakes (2.5MB) of our attempts.
Although slugs are relatively difficult to see under daylight with a naked eye,
they can be relatively easily detected with a CMOS image sensor under red
illumination. Under red light grass and other vegetation appears dark whilst
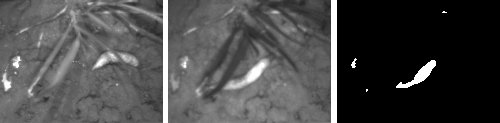
slugs appear quite brightly. The three images below slow the same slug, which is
a 32mm long Deroceras reticulatum, under different lighting conditions.
The left image is illuminated with white light, the middle image is illuminated
with red light, and the right image is the middle image but with a simple
threshold applied. On the left of the left image is an area of high slug slime,
this is also filtered out by illumination with red light. Unfortunately stones
also appear quite brightly as well.
The final stage is the elimination of stones by the identification of bright
patches that are of the correct size and shape for slugs. This is achieved by
finding the biggest connected bright patch in each image and by calculating the
ratio of bright (slug/stone) pixels to dark (background) pixels within a boxed
area around the bright patch. The length and width of this box are equal to the
length of the patch. The rationale behind this is that most of the time slugs
are stretched out and are long and narrow and hence fill a small proportion of
the box, whilst stones tend to be much rounder and fill a much higher proportion
of the box. This system has the advantage of being invariant to the orientation
of the object under examination and within pre-set bounds of its size.
|
|
Once a robot has collected a load of slugs it will need to return to the static
fermentation station before its battery is fully discharged. Locating the
station will be achieved by using a combination of the Differential Global
Positioning Satellite (DGPS) system, conveniently set up for us in advance by
the American military, and an active infrared localisation system. DGPS, which
offers sub-meter resolution, can also be used by the robots for mapping out food
resources. Obstacle detection will be achieved by a combination of ultrasonic
sonar and bump sensors.
Current Status of Project
Currently the prototype can move, scan, detect and almost collect slugs whilst
ignoring stones; in the laboratory under conditions similar to those found in
real agricultural fields, see the following mpeg movies:
short clip (3.3MB) and longer clip
(10.5MB) (please note that no animals were harmed during
these experiments - the slug is plastic) Unfortunately the current gripper
cannot collect slugs/sausages that are in deep dips in the ground. Work has now
started on the development of a usable microbial fuel cell. and longer clip
(10.5MB) (please note that no animals were harmed during
these experiments - the slug is plastic) Unfortunately the current gripper
cannot collect slugs/sausages that are in deep dips in the ground. Work has now
started on the development of a usable microbial fuel cell.
For further information about the SlugBot please see my publications.
Back to Ian Kelly's home page
|