|
Towards True Robot Autonomy - Slugbot |
|
|
The laboratory is interested in the energy autonomy of mobile robots. The SlugBot Project represents the first stage of a study in energy autonomy; a proof-of-concept vehicle capable of detecting and collecting slugs. This phase is now finished and the details below relate to the final status of the SlugBot Project as of May 2001. The current research is now focusing on the use of microbial fuel cells and plant material as the source of nutrition. Please follow this link for more details
|
|
Most mobile robots are not truly autonomous; most operate in simplified environments. Almost all non-industrial robots still require a helping hand from humans, e.g. battery charging, the odd push if they get stuck, obstacles that are suited to their sensors, etc. The notable exceptions are smart missiles, satellites and torpedoes which carry enough fuel and computational resources to successfully complete their missions. However, we are interested in building robots which will be self-sufficient in terms of decision making and energy - robots which can be left unsupervised to organize their work and nourishment. The work on energy autonomy in robots is an on-going process. The initial stage looked at the problems faced by a robot predator. It is not only the energy transformation process but the necessary behavior of the robot which we wish to study. This is an important point - the two processes are tightly interlinked. In this case the robot 'hunted' slugs. The collected slugs would be fermented to produce biogas in a separate off-board digester unit. The gas would then be passed through methane fuel cell to generate electricity. The electricity would be stored in batteries and could be downloaded to a 'hungry' robot. We are currently working on the employment of a different type of 'digester' - the microbial fuel cell (MFC). In this type of cell microbes are employed in a special container with a semi-permeable membrane to extract electrons from the nutrient (such as carrot peelings) and pass them onto an electrode. In this way a form of 'biological battery' can be made.
|
The first phase of study: The SlugBot Project
|
|
|
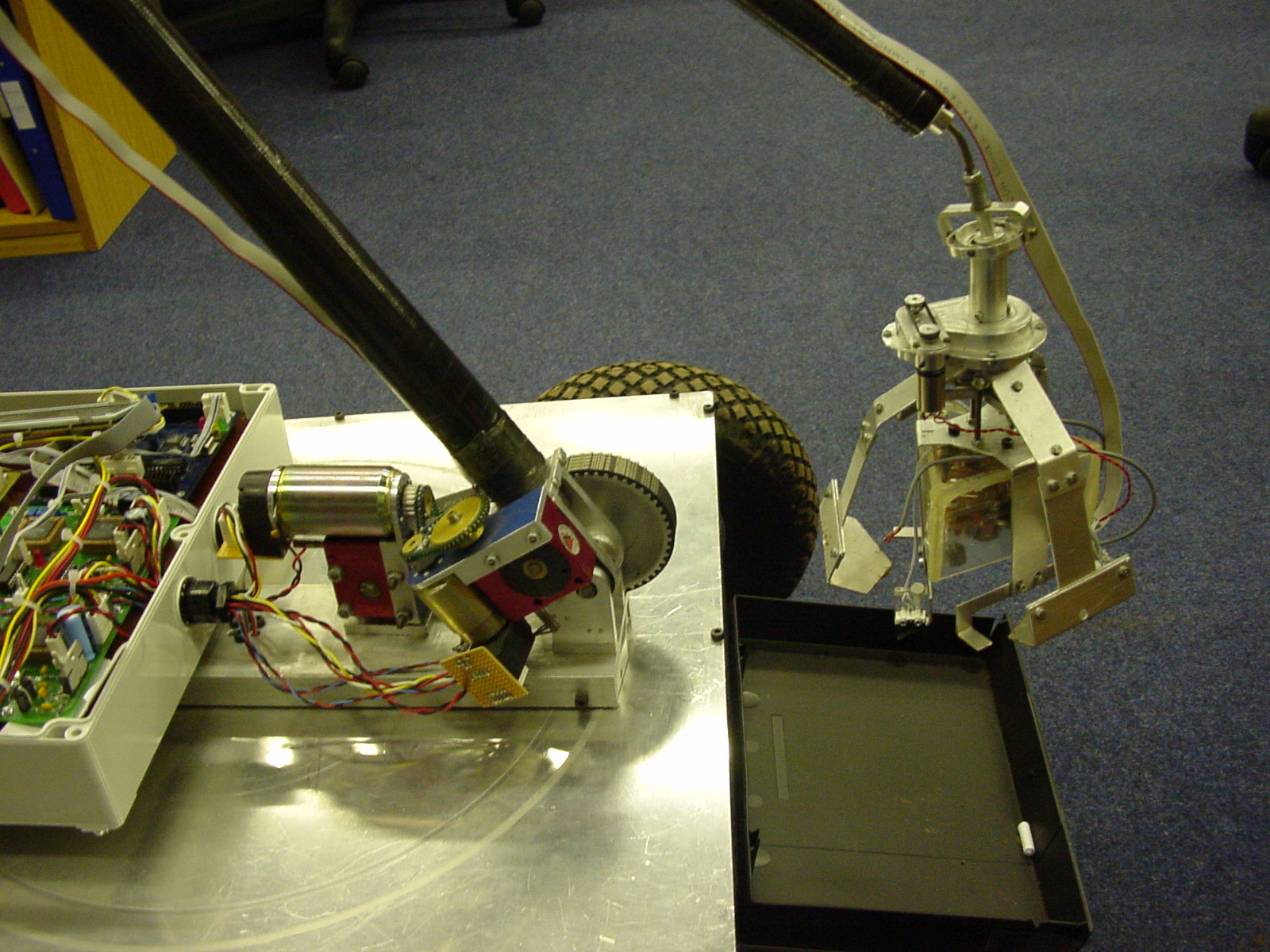
Apart from their relative ease of capture (compared to zebras), slugs were chosen because they are a major pest, are reasonably plentiful, have no hard shell or skeleton, and are reasonably large. It is also more technologically interesting to catch mobile prey rather than just grazing on plants. Of course, the organic resources, or food (i.e. slugs), will have to be converted to a form of energy that is useful to a robotic system. Agricultural fields of winter wheat offer a suitable test bed for the robots because slugs (Deroceras reticulatum, Arion ater ater and Arion ater rufus) are plentiful, with up to 200 per square metre. Slugs are mainly active at night, especially just after sunset and just before sunrise, so the robots will have to be active at these times, and resting in order to conserve energy during the day when most slugs are underground. Since energy conservation will be of prime importance, and moving heavy items over soft ground will consume large amounts of energy, the fermentation vessel, engine and generator will be stationary. One or more robots will deliver slugs to the stationary charging system and obtain power from it. In order to minimise the amount of movement each of the robots will be equipped with a 1.5m long arm, mounted on a turntable, which will be used both for detecting and collecting slugs which is now working under closed loop computer control as can be seen on the Slugbot Home Page (Click Here) or goto ..\home.htm and follow robots link then click onto picture of the SlugBot. Although slugs are relatively difficult to see under daylight with a naked eye, they can be relatively easily detected with our image sensor under red illumination. Under red light grass and other vegetation appears dark whilst slugs appear quite brightly. The three images below slow the same slug, which is a 32mm long Deroceras reticulatum, under different lighting conditions. The left image is illuminated with white light, the middle image is illuminated with red light, and the right image is the middle image but with a simple threshold applied. On the left of the left image is an area of high slug slime, this is also filtered out by illumination with red light. Unfortunately stones also appear quite brightly as well. The final stage is the elimination of stones by the identification of bright patches that are of the correct size and shape for slugs. This is achieved by finding the biggest connected bright patch in each image and by calculating the ratio of bright (slug/stone) pixels to dark (background) pixels within a boxed area around the bright patch. The length and width of this box are equal to the length of the patch. The rationale behind this is that most of the time slugs are stretched out and are long and narrow and hence fill a small proportion of the box, whilst stones tend to be much rounder and fill a much higher proportion of the box. This system has the advantage of being invariant to the orientation of the object under examination and within pre-set bounds of its size.
|
|
|
|
Currently the prototype can move, scan, detect and almost collect slugs whilst ignoring stones; in the laboratory under conditions similar to those found in real agricultural fields, see the following mpeg movies on the lab website (use the link given above). Please note that no animals were harmed during these experiments - the slug is plastic! This proof-of-concept system does not deal with navigation. A complete system would also require the ability to return to the static fermentation station before its battery became fully discharged. Locating the station would most likely be achieved by using a combination of the Differential Global Positioning Satellite (DGPS) system, conveniently set up for us in advance by the American military, and an active infrared localization system. DGPS, which offers sub-meter resolution, can also be used by the robots for mapping out food resources. Obstacle detection could be achieved by a combination of ultrasonic sonar and bump sensors.
|
|
|
The Ecobot ProjectThe team comprising Prof. Chris Melhuish, Prof. John Greenman, Prof. David McFarland and Dr John Hart is now actively seeking further funding for the next stage of the investigation. The robot system will be code-named ECOBOT. In many ways the system will mimic real digestion (e.g. in the use of micro-organisms within a tubular membrane to break down the food components and produce reducing power) and respiration (e.g. using air to provide oxygen to an electrochemical half-cell to create useful energy). We believe that this robot will be the first robot capable of autonomous behaviour powered by an on-board microbial fuel cell (MFC), i.e. that will employ artificial metabolism. This system is CO2 neutral; it does not utilise fossil fuels and involves no net CO2 production other than that which occurs naturally in vegetable decomposition. For a robot to behave autonomously it will need to balance its stored energy reserve (from an accumulator), energy rate (supplied by the MFC) and 'potential' capacity of energy (in the MFC) against the requirements of its mission, replenishing its food and draining the waste from the MFC. The energy output from the MFC will not sustain continuous activity by the robot. Energy needs to be accumulated first before being accessible to the robot. This is an important difference and we argue, is more realistic than simply managing a fixed energy budget. The artificial digestion system will be specifically targeted to the requirements of a mobile robot. By judicious choice of different food/flora combinations, the techniques envisaged will be capable of exploiting any organic food source on land and sea, and can potentially therefore be employed by terrestrial and marine robots. |


|
| Questions on the EcoBot group to Chris Melhuish: chris.melhuish@uwe.ac.uk |